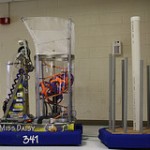
This year’s build season has gone exceptionally well. The design process was done in only a couple of days. Our robot’s final design incorporated many ideas from different students and mentors. Construction began within the first week of the build season, with a plan that satisfied the entire team’s wants. The base was completed equally fast with the momentum already gained, and Miss Daisy was driving by the end of week two. On the same day we started, “Driving Miss Daisy,” the top function arrived from North Montco Technical Career Center (NMTCC). Using the concept of a polycord roller system we have proven how efficiently the robot can lift the balls from the floor, and shoot them into opposing trailers. Currently some issues are pressing the entire team’s mind. To successfully accomplish our stated goals, some major engineering solutions will need to be achieved, such as a gate system to store more balls and a hopper (which is being machined at NMTCC). We are confident that we will be able to complete the robot early, leaving plenty of time for the programming team to test out, and possibly break, the robot.
Recent Posts