2012: Rebound Rumble
In 2012, we broke our glass ceiling yet again. Miss Daisy set new personal bests and new world records for number of first seeds, number of wins overall, and highest scoring game in the official season. We competed hard and won two MAR district competitions, the MAR championships, and the Boston Regional. We finished the season as a Curie finalist. Our spirits were high going into 2012, and we hope to continue achieving great milestones! We ended the year with a record of 87 wins, 12 losses, and 1 tie.
Awards at a Glance
- Hatboro Horsham District Champions
- Hatboro Horsham Industrial Design Award
- Chestnut Hill District Champions
- Chestnut Hill Gracious Professionalism Award
- Chestnut Hill Website Award
- Boston Regional Champions
- Boston Regional Industrial Design Award
- Boston Regional Industrial Safety Award
- Mid-Atlantic Robotics District Championship Champions
- Mid-Atlantic Robotics District Championship Industrial Design Award
- Championship Curie Division Finalists
- Monty Madness Champions
- Duel on the Delaware Champions
- Ramp Riot Champions
- New Brunswick Eruption Champions

2012 Robot, “Miss Daisy XI”
Chassis:
- 120.0 lbs and 53” tall
- Very low center of gravity; Robot must tip >70 degrees before it doesn’t return to its wheels!
Drive:
- 8 6” Traction Wheels with Blue Nitrile tread
- 4 CIMs and 2 Speeds: 5 ft/second and 12 ft/second
- Can climb the barrier and the ramp
Intake:
- 37” wide over-bumper intake
- Can collect balls anywhere on the floor – including against the walls and in corners – at full robot speed
- Dropped by a pair of 1.5” bore pneumatic cylinders to lower the ramp
- Balls are thrown into hopper where they are sorted and indexed into the elevator
- Hopper has a moving bottom to agitate balls and ensure that they enter the elevator in single file
Shooter:
- Dual 6” Skyway wheels powered by dual 0673 Fisher Price motors
- Shooter hood has two grooves to center balls and ensure repeatable shots
- Can score from 10’ – 25 ’ from the high goal
- Maximum fire rate of 3 balls in under 1 second
Sensors:
- Axis Camera and LED ring for automatic targeting
- Encoders and gyro on the drive for precise autonomous mode movement
- High speed optical counter on shooter wheel for precise wheel speed control
- Pitch gyro for software-assisted ramp balancing
Software:
- Feedforward PIV control loops fuse vision system and gyro for near instantaneous auto targeting
- Autonomous modes to score more than 2 balls in autonomous mode

Photos
- Brainstorming
- Build Season
- Hatboro-Horsham District Competition
- Chestnut Hill District Competition
- Boston Regional
- Mid-Atlantic Regional Championship
- Championship Competition
- Monty Madness
- End-of-Year Team Photos
- Senior Crate Signing
- Indiana Robotics Invitational
- Duel on the Delaware
- Ramp Riot
- North Brunswick Eruption
- 341 Night
Videos
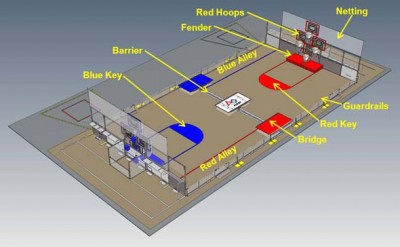
2012 Game Challenge, REBOUND RUMBLE™
In Rebound Rumble℠, robots have the goal of shooting basketballs into basketball-like hoops of three different heights and also balancing on a bridge with one to two other robots. During the first 15 seconds of the match, also known as the Hybrid Period, teams have the choice of using purely code-based movement or using the XBOX 360 Kinect during autonomous. Teams cannot cross the line, but they are able to retrieve balls from their alliance’s and the center bridge. The next 2 minutes are part of the teleop period. During this time, drivers gain control of their robots and score as many basketballs as possible. The top hoop is worth 3 points; the middle, two points; and the bottom, one. Robots can shoot from anywhere on the field. At the end of the match, in the qualifying rounds, robots can balance on any of the 3 bridges located in the center of the field. The middle bridge is worth two Co-opertition points while each alliance’s bridge is worth varying points based on the amount of robots on the bridge.
















2000-2025 FIRST® Robotics Competition Team #341, Miss Daisy. Wissahickon High School. All Rights Reserved.