2018: FIRST® POWERUP
2018 was a year that set many precedents for future seasons. With the decision to go to Midwest Regionals came new experiences that opened our team’s eyes to the possibility of future out-of-region competitions. Also, a decision was made later in the season to allow freshmen to apply for the team. This way, students can build lasting bonds with fellow team members and leaders before their time with the team comes to a close. Throughout the season, our team did amazingly, receiving several finalist positions and awards. Of these awards, the most notable was the Engineering Inspiration Award at Midwest Regionals-a prestigious award given to teams that exemplify both a strong robot design as well as continual outreach within their community. Such achievements motivated team members to carry over the strong performance into off-season competitions, being finalists in both Duel on the Delaware and Brunswick Eruption. Overall, 2018 was a year of successes and improvements that will hopefully lead to great performance in the future.
Awards at a Glance
- FIRST® Mid-Atlantic Montgomery District Competition: District Event Finalist
- FIRST® Midwest Regional Competition: Robot Engineering Inspiration Award
- FIRST® World Championship Competition: Carver Subdivision Finalist
- Duel on the Delaware: Event Finalist
- Ramp Riot: Gracious Professionalism Award
- Brunswick Eruption: Event Finalist

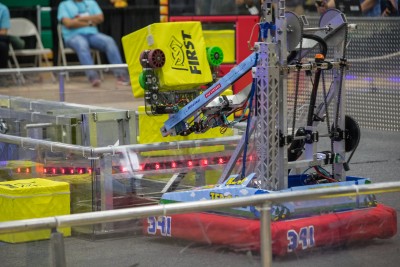
2018 Robot, “Miss Daisy XVII”
Overall Robot
- 115 pounds
- 47″ tall, 27.5″ wide, 32.5″ long
- Low center of gravity
Drive
- (8) 4″ VexPro VersaWheels with .100″ drop center
- (4) CIM drive geared at 11 ft/s
- Custom PTO off drive gearbox for a 2-4 CIM hang
- Sheet metal design
- Electronics mount directly onto belly pan
Cube Manipulator
- Two-joint arm constructed of aluminum 2″x1″ tubing
- Shoulder joint powered by (2) 775pro motors with four-stage reduction of 1,225:1Mast appendages positioned 15″ apart; forearm appendages positioned 9.5″ apart
Climber
- 3-stage telescopic arm constructed of aluminum square tubing with Teflon and HDPE inserts
- Custom square carabiner comprised of aluminum, polycarbonate, standoffs, and surgical tubing
- Pancake cylinder release
- winch to retract telescopic arm and lift robot
Intake
- Sprung-wheel design developed to confirm to conform to cube orientations
- Pneumatic-actuated pincers incorporated to keep a firm grip on cubes during transport and scoring
- Vertically-mounted 775pro motors, two-stage VersaPlanetary gearboxes, 15:1 gear reduction
- 1/4″ polycarbonate plates provide a strong structure while reducing weight
- (6) 4″ compliant wheels retrieve and deliver cubes and attack them from any angle
- Attached to the arm by a hex shaft, short chain run, and powered by a Mini CIM with 3-stage reduction of 98:1
- Total weight: 11.8 lbs
Sensors
- Drive: Integrated encoders with custom 3D-printed mount
- Intake: Limit switches to detect cube possession
- Cube Manipulator: CTRE Magnetic Encoder; VexPro Integrated Encoder
Software
- Wrist logic ensures the 16″ perimeter is not broken
- Switched from text-based to command group-based autonomous which allows us to run multiple commands in parallel
- Created logic to ensure the arm and wrist always know at what angle they are
- Created logic to ensure the arm and wrist cannot be accidentally overstretched
Photos
- Kickoff & Brainstorming
- 2018 World Championship in Houston, TX
- WHS Pep Rally
- Westtown District Competition
- Shady Grove Elementary Demo
- Ramp Riot XIX
- 2018 Pike Fest
- Montgomery District Competition
- Midwest Regional
- Lower Gwynedd Elementary Demo
- 2018 Fall Training
- 2018 Elementary School Science Nights
- Boys & Girls Club Demonstration
- Duel on the Delaware
- 2018 Build Season
- Brunswick Eruption
- 2017-2018 Team Photos
Videos
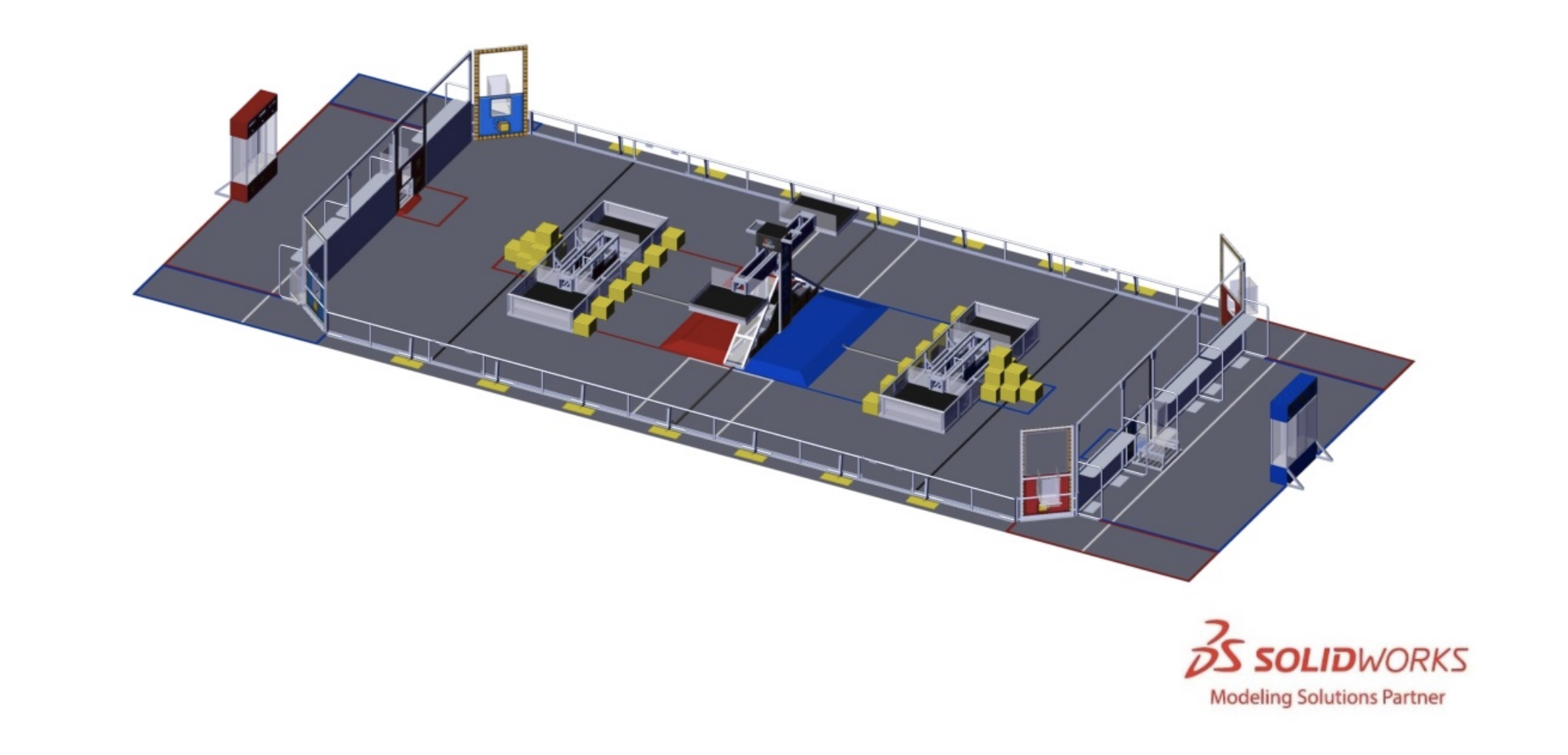
2018 Game Challenge, FIRST® POWER UP
This year’s FIRST Robotics Competition game for the 2018 season is FIRST POWER UP. It involves two alliances of three teams each, with each team controlling a robot and performing specific tasks on a field to score points. The game has a retro 8-bit theme and teams are required to place milk crates, or “power cubes”, on large balancing scales to tip the scale and gain ownership. Alliances can also trade power cubes for power ups, giving them a temporary advantage in a match. At the end of the match, robots can climb the tower attached to the center balancing scale using a rung attached to the tower, giving them additional points.
















2000-2025 FIRST® Robotics Competition Team #341, Miss Daisy. Wissahickon High School. All Rights Reserved.