2019: FIRST® DESTINATION DEEP SPACE
The 2019 season taught us the importance of balance and simplicity. After a brainstorming period full of ambitious ideas, our team began designing our most versatile robot yet. It was after this design period that we brought Miss Daisy XVIII to three district competitions and the Detroit World Championship. With each competition, we redesigned portions of our robot to better suit our game strategy. This process of constant iteration put into perspective the value of analyzing our work and thinking three steps ahead before pursuing ideas. We realized that there is a fine line between innovation and impracticality, and will remember this lesson for future seasons. During award ceremonies, we were recognized by judges for our business plan and gracious professionalism. These successes motivated us to continue our work into offseason, where we developed projects throughout the summer and into the next fall. This hard work culminated in our off-season competitions, where our robot made its mark on the field. We were at finalist at Capital Cup, and a quarter-finalist at Duel on the Delaware. This was a spectacular season for growing into our new spaces and developing creative mechanisms.
Awards at a Glance
- FIRST® Mid-Atlantic Westtown District Competition: Entrepreneurship Award
- FIRST® Mid-Atlantic Seneca District Competition: Entrepreneurship Award
- FIRST® Mid-Atlantic Bensalem District Competition: Gracious Professionalism Award
- Capital Cup Finalist

2019 Robot, “Miss Daisy XVIII”
Overall Robot
- 125 pounds
- 47.75″ tall, 27.75″ wide, 31.75″ long
- Manipulates all game pieces and scores them in all possible ways
Drive
- (8) 6″ high traction wheels
- Constructed of .09″ custom bent sheet metal
- Custom 4-NEO gearboxes with power takeoff
- 11.5 ft/sec gearing
Elevator
- Two-stage cascading elevator with moving carriage
- Custom 775 gearbox able to lift the carriage to top height in 0.5 seconds
- 2″x1″ aluminum extrusion for vertical masts and crosspieces
- Carriage made of lightweight plastic 2″x1″ extrusion
- Chain-driven second stage, with stringing to lift carriage in a cascading style
Cargo
- Over-the-bumper intake designed to lift the robot onto the HAB platform
- Intakes balls on the opposite side from which they are scored for quick cycle times
- Conveyor system delivers cargo to the elevator
- Lightweight scoring mechanism that can score a cargo at any rocket position
Hatch Ground Intake
- (6) 2.25″ HD compliant wheels
- Powered by a BAG motor through a 5:1 VersaPlanetary gearbox
- Piston mounted under belly pan to raise and lower
Hatch Scorer
- Two articulating lexan fingers
Habitat
- Synchronized lift of the front and back of the robot onto tier 2
- Cargo intake doubles as front-lifting mechanism
- Two pistons lift back end of the robot onto platform
- Constant force springs passively retract the rack mechanism
Software
- Uses Raspberry Pi for filtering/vision
- Custom driver station arcade panel to control robot actions
- Utilizes goal tracking software to constantly be aware of potential scoring locations

Photos
- Ramp Riot XIX
- Kickoff & Brainstorming
- 2019 Build Season
- Johnson and Johnson Engineering Showcase
- Westtown District Competition
- Seneca District Competition
- Bensalem District Competition
- 2019 World Championship in Detroit, MI
- 2019 Wissahickon Valley Historical Society Community Demo
- 2019 Shady Grove Science Night
- Capital Cup
- 2019 Pike Fest
- Duel on the Delaware
- 2018-2019 Team Photos
Videos
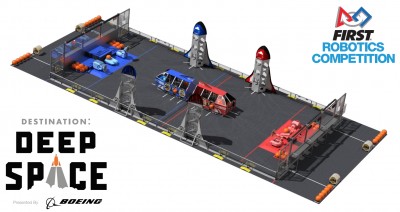
2019 Game Challenge, FIRST® DESTINATION DEEP SPACE
This year’s FIRST Robotics Competition game for the 2019 season is FIRST DESTINATION DEEP SPACE. It involves two alliances of three teams each, with each team controlling a robot and performing specific tasks on a field to score points. The robots work to fill a cargo ship and two rockets with cargo and hatch panels before safely returning to the habitat platforms. Alliances gain points depending on the number of gamepieces scored, as well as which level of the habitat platforms they climb to at the end of the match.
















2000-2025 FIRST® Robotics Competition Team #341, Miss Daisy. Wissahickon High School. All Rights Reserved.