2008: FIRST® Overdrive
2008 was a year full of excitement for Team 341. Team members put in a lot of hard work and in the end, Miss Daisy paid back in full. The team walked away from the Philadelphia regional with the Chairman’s Award in one hand, and the Regional Champion title in another. In the summer, the team was invited to England to demonstrate Miss Daisy at the Farnborough Air Show.
Awards at a Glance
- Championship Kleiner-Perkins Entrepreneurship Award
- Championship Finalist AutoDesk Inventor Award
- Philadelphia Regional Chairman’s Award
- Philadelphia Regional Champions
- FIRST® Robotics Website Excellence Award

2008 Robot, “Miss Daisy VII”
- 4 omni wheels, ability to travel in any direction at any time is effective for:
- Maneuvering around the ends of the track
- Avoiding oncoming opponents and obstacles
- Easily grabbing the ball from any position
- Fitted pneumatic claw and arm system can:
- Easily push the ball off the rack in autonomous
- Lift and roll the ball over the rack for a hurdle
- Place the ball on top of the rack at the end of the match
- Automatically stays within the 80″ cylinder rule via programming
- Low to the ground and stable center of gravity
- Solid extruded aluminum construction
- Acceleration-limiting software to ensure that the robot never tips
- Infrared ball-tracking sensor to close the claw when within range

Photos
- Kickoff in Manchester, New Hampshire
- Brainstorming
- Build Season
- Trenton Regional Scouting Trip
- FTC Weatherly Regional (Singapore)
- Chesapeake Regional
- Philadelphia Regional
- Championships in Atlanta
- PA Robot Challenge
- Farnborough Air Show, UK
- London Trip Sights
- Duel on the Delaware
- Ramp Riot
- 341 Night
- Wissahickon Middle School Science Night
Videos
2008 Game Challenge, OVERDRIVE™
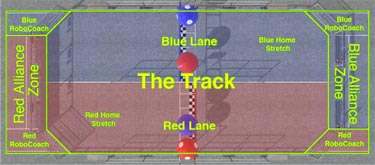
The field for FIRST® OVERDRIVE™ consists of a circular ‘track’ created by dividing the field down the middle lengthwise with a tall metal separater. Across the middle of the narrow dimension of the field runs an overhead track where large balls called ‘trackballs’ sit at the beginning of each round. Two alliances, red and blue, composed of three teams each, compete in a 2 minute and 15 second long match. The object of each match is to score more points than your opponent by making counter-clockwise laps and manipulating the ball in different ways while making laps. A match is divided into two periods. The first, the ‘hybrid period,’ is 15 seconds long and is at the start of each match. During this period robots can be controlled by pre-programmed instructions and/or transmitted information via remote from a ‘robocoach,’ or human player. The second period, the ‘teleoperated period,’ is 2 minutes in length. During this period human drivers are in full control of their robots. Alliance robots start catty-corner to each other on the field and must all be touching the wall of their respective end. Robots can only handle one trackball at a time and may not impede the flow of traffic on the track. Robots are also not allowed to aggressively go after their opponent’s bots and are especially restricted from preventing a robot from hurdling if that robot has already started the process of doing so.
















2000-2025 FIRST® Robotics Competition Team #341, Miss Daisy. Wissahickon High School. All Rights Reserved.