Week 3: Design & Mechanical by Willow B.
Week 3: Design & Mechanical by Willow B.
Tuesday: The intake team added a conveyor to the back of the intake, and the wheels were replaced with rollers, which we painted in polyurethane today. The magazine team added a CAM mechanism and a chamfer was added to the edge as well as sizing adjustments. The shooter also had a few minor tweaks, but for the most part all the changes were pretty small. I would say that we are almost satisfied with the prototypes. I believe we will finalize them soon, but then we will get in to the real challenge of fitting everything together, which will be difficult as we still don’t have a drive base or climbing mechanism.
Thursday: Today we continued with the prototyping. It was much the same as it has been all week with continued improvements to the prototypes. We are still waiting to assemble our frame and drive base. We still need to perfect our prototypes, but it still seems like the robot is coming along well so far. By the end of build season, we’ll probably be working on the mobile museum robots.
Friday: Some of the prototypes are now so close to completion that we are down to small tweaks. The shooter is working well, and the next step is integrating it with the robot. The magazine is still not working at the level we want it to be, so prototyping will continue on that until it’s as efficient as we want it to be. Progress with the intake feels like we took two steps forward and one step back. So far we have had so many different prototypes that we’ve lost count, and many of them have worked well. For weeks now, we have been able to pick up frisbees quickly, and for over a week we have been able to funnel two frisbees consistently. Still, because we are aiming for nothing less than perfection, it seems that the intake still has a great deal of revision ahead. At the end of the third week, we were beginning to feel the pressure of time, and many of us are ready to dive into the chaos that will come when we really start putting together our robot.
Week 4: Design & Mechanical by Willow B.
Saturday: Prototyping continued, as well as the development of the mobile museum robots. It is now the fourth week, and we still only have three prototypes (although very good ones), and an idea of what we want the robot to look like. We are hoping to get our parts in, and have the actual robot started by the end of this week.
Tuesday: Today we continued to prototype. We are still finishing up with the last few improvements. We got some motors and other various parts. We also gave a presentation to the visiting Singaporean team, demonstrating our shooter prototype and an old robot. We are still hoping to get parts for the robot in soon.
Wednesday: Today the mechanical team came in for a few hours to do some more tweaking. By using a belt, the magazine group got the magazine working efficiently. We can now shoot out frisbees very quickly, even when they’re upside down. Meanwhile, the machinists-in-training of the mechanical team fired up the mill (to actually use as more than a drill press!) and started making slots for the shooting wheels. Construction of the robot has officially begun, but we still don’t have a climber, drive train, or a lot of the parts we need.
Thursday: More loose ends were tied up today, as a few prototypes were fixed, and the outline of our shooter was built. We are definitely expecting the parts we need to put the robot together to come in tomorrow, and we are all psyched!
Friday: Today the parts finally came and the mechanical team quickly riveted the frame of the robot together. Seeing the base of our robot for the first time really lit a fire under us, and mechanical work stepped up the work big time. The final push is ahead of us, but we can all sleep a little easier now that we have the main body of our robot built, that is, if we have time to sleep in between all the robot-building.
 Week 3: Media by Emily O.
Week 3: Media by Emily O.
Our main focus this week was on our mobile museum and our vlog as the weeks prior. We had to rewrite much of our Mobile Museum scripts to make them more focused toward the robot and less generalized. We are hoping to get these scripts approved by our head coach at the beginning of next week and start filming. Also, the animation team has finished the Elephant for the pneumatics section and they are now working on the monkey, whose working name is Kiki, for the mechanics section.
The vlog is coming along well and we are on schedule to finish this video by the end of next week. The Super Mechanics sketch is almost done! This coming blog will also feature students from the Temasek Secondary School from Singapore! We are highly anticipating their arrival next week and we have already done introductory interviews with some members about their anticipation for the visit. The Singaporeans arrived in the afternoon on Thursday, but the students first met them on Saturday during one of their competitions. We are excited to share our experiences with everyone next week!
Week 4: Media by Emily O.
We are happy to announce the publication of our second vlog! As promised, the Super Mechanics sketch is finally published and it is amazing! (I did not make it, so I am not complimenting myself). I personally believe that this is our best vlog yet, and in the first five days, we already almost have 1,000 views! Serious props to Liz and Diana for coordinating the Vlog this week.
The mobile museum is going kind of slow right now. We just had our first script approved, so we are excited to start really working next week. We started our real storyboard in Photoshop and are working on the overall appearance of the mobile museum. We are extremely excited to start filming next week!
Animation by Sarah A.
This week, our animation team members practiced animating objects. Many of us have been working on trying to make things do basic movements such as walking and waving with the Iikos from the previous seasons and our new characters. We also continued making parts for the mobile museum.
 Electrical by Emily V.
Electrical by Emily V.
The fourth week was a huge take-off in the progress of the robot build. We had a huge influx of incoming parts and we were able to get together the necessary parts to put together an electrical board. We had to do a lot of little things to get ready for the construction of the board. A lot of the first day was crimping the fan wires and getting them connected to the 12V and GND connections of the voltage. It was a lot of work to do that for 22 victors.
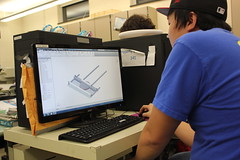
We printed out a scale 2D model of the belly pan and tried to find the optimum location for each part, taking into consideration the difficulties of wiring and also the structure of the robot. We ran into some trouble with the size of the cRio once the modules were attached, and we found that there was a lack of height clearance in the front of the belly pan due to the motion of our intake system. After testing different locations of the cRio in our CAD model, we were able to decide a proper location and orientation. We finally decided to put the cRio in the back where there would be a better height clearance from the modules, but the cRio had to be at an angle to lower the height of the modules.
Once the mechanical team had finished the chassis, we had a belly pan to attach electronics to. We had spent a lot of the week planning out the layout of the electronics, and it was very easy to see where the electronics should be in the CAD model. Because we planned out the layout ahead of time, we didn’t have to wait for the Mechanical team to build claw system to figure out where the electronics would fit. Saturday was dedicated to the actual construction of the electronics board after an entire week of planning.
 On Saturday, the electrical captains assembled a team to help build the electronics board for both the twin and main machine. Building simultaneous electrical boards was a little overwhelming, especially with a lack of leads. It was also a little difficult to coordinate an efficient system to complete the boards efficiently whilst teaching electrical team rookies, but we found that it was easy to teach off of the main machine and show them how to complete each task so that they could easily do the same on the twin. That way we could delegate work effectively and make sure that both machines are consistent in construction. At the end of the day, we were able to securely attach each electronic and hook up the power distribution board to each of the victors.
On Saturday, the electrical captains assembled a team to help build the electronics board for both the twin and main machine. Building simultaneous electrical boards was a little overwhelming, especially with a lack of leads. It was also a little difficult to coordinate an efficient system to complete the boards efficiently whilst teaching electrical team rookies, but we found that it was easy to teach off of the main machine and show them how to complete each task so that they could easily do the same on the twin. That way we could delegate work effectively and make sure that both machines are consistent in construction. At the end of the day, we were able to securely attach each electronic and hook up the power distribution board to each of the victors.
 CAD by Pranav K.
CAD by Pranav K.
The CAD team has been hard at work these past two weeks. Because this was a difficult challenge, we have been struggling to design robot parts that will both function properly, be easy to fix, and have that extra cool factor. The CAD team has, for the most part, been working alongside the mechanical and electrical teams by pulling up part designs and helping them cut certain parts and assemble them. Our CAD model, at this point, is about 85% complete, which is a major success compared to the past few years, where we have generally lagged behind the robot build. The general design of the robot is finalized, and all that is left is to cad up a few missing parts (i.e. bolts, rivets, nuts, etc.) and also to finish some assemblies by adding in sprockets, chain assemblies, and wires. Just this past Saturday, the electrical team completed a large part of of the electrical board, so now we have the task of finding their placements and wiring the victors, power distribution board, cRio, sidecar, and battery. We are very fortunate to have the help of two very skilled mentors: Brian Sherman and Dustin Benedict. They have helped us both draw up the whole CAD model and have also increased our knowledge of technical parts and of advanced mechanisms, both of which are very prominent on this year’s robot. In the last couple of weeks, we hope to complete our model and continue our work with the mobile museum project, which is ongoing.