Driven to exceed the expectations of a new game challenge, members of Team 341 put their minds together to develop a robot for the 2015 FRC game challenge, Recycle Rush. Miss Daisy XVI, the result of our efforts, is 100% student-made and serves as an example of classic Daisy dedication.
Unlike the games of previous years, Recycle Rush does not demand a high degree of sturdiness or protection against other robots. As there is a strict weight requirement of 120 pounds, this allowed the robot’s weight to be focused on strength, not sturdiness. There were no restrictions on robot size during game-play, but there were restrictions on its size during transport; any components that were bigger than these restrictions had to be moved on to another part of the robot. While scoring with litter can be a valuable source of points, the team determined during brainstorming that it would be easier to score multiple totes than multiple litter pieces.
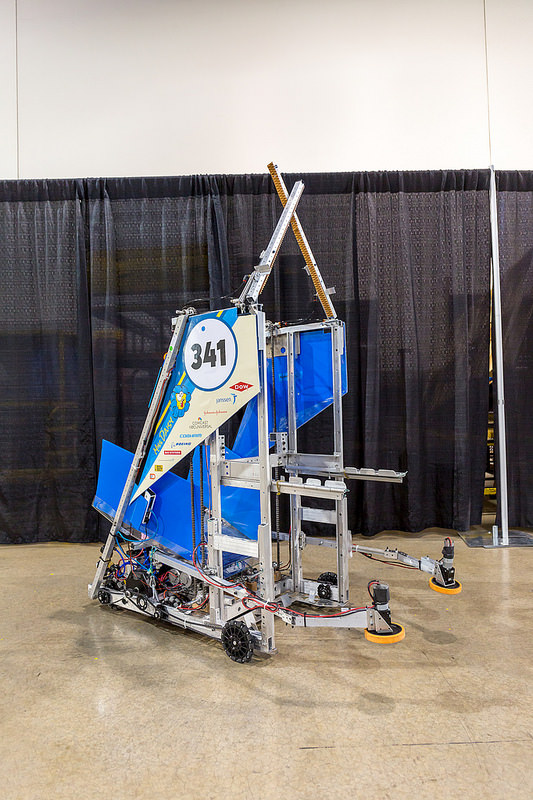
At forty-one inches tall and 118 pounds, Miss Daisy is a lean, mean stacking machine. The drive train has four omni-wheels on the ground and two small idling ones to help the robot navigate over the scoring platform; these are powered by two CIM motors on either side. The chassis is made from aluminum, with three perpendicular rails providing structural rigidity.
In front of the chassis is the intake: one, angled, hinged arm on either side of the robot with orange BaneBots wheels on the ends to pull totes and containers into the elevator. While the intake is designed to pick up containers, this can only occur when they are lying on their sides. We focus on building stacks of up to six totes and allowing our alliance partners to “cap” stacks with containers. The elevator is driven by two CIM motors and a SuperShifter connected to two chains hung from an axle on top of the robot. As the intake pulls in totes, the elevator lowers and picks them up in time for another game piece to be pulled in beneath it. The robot and drive team can also utilize human loading; this process is assisted by a lexan tote ramp that lets totes run cleanly from the back of the robot to the intake.
On the very top of the robot are two aluminum arms with rough top tread, which helps keep containers in place when they are on top of a tall stack. To accommodate the rules regarding transport configuration, the intake arms can be easily removed and leaned against the elevator.